Les applications industrielles les plus courantes pour les engrenages sont la transmission de
puissance entre des arbres parallèles, les arbres A et C de la figure 12.1, des arbres à 90
concourants dans un plan, les arbres C et B et des arbres à 90
les arbres A et B.
Les arbres parallèles sont raccordés par des engrenages cylindriques externes ou internes,
c'est-à-dire que les dents sont disposées sur l'extérieur, figures 12.2(a) et (b), ou l'intérieur d'un
cylindre, 12.2(c). Lorsque le flanc des dents est disposé parallèle à l'axe x autour duquel le cylindre
tourne, on a un engrenage cylindrique droit, figure 12.2(a). La figure 12.2(b) montre un engrenage
cylindrique mais dont les dents sont disposées sur le cylindre de telle sorte que leur flanc fait un
certain angle avec l'axe x du cylindre; ainsi, la dent s'enroule selon une portion d'hélice autour du
cylindre, d'où l'appellation d'engrenage cylindrique hélicoïdal. Les engrenages cylindriques internes
sont aussi fabriqués avec une denture hélicoïdale.
Les arbres perpendiculaires et concourants dans un plan, les arbres B et C de la figure 12.1
sont réunis par des engrenages coniques, figures 12.3(a). Ces engrenages sont dits coniques parce
que leurs dents sont disposées sur un tronc de cône dont le sommet est au point de rencontre des
axes des arbres, figure 12.3(b). Dans les engrenages coniques droits, figure 12.3(a) et (c), les dents
sont disposées sur le cône de telle sorte que leurs flancs convergent tous vers le sommet du cône.
Les engrenages coniques peuvent être fabriqués avec des dents droites mais qui ne convergent pas
vers le sommet du cône : les dents alors s'enroulent en une spirale sur le cône, figure 12.3(d); on les
appelle engrenages coniques gauche. Si les dents sont courbées, figure 12.3(e), elles deviennent ce
que l'on appelle des engrenages coniques spiroïdes. Les engrenages coniques droits et spiroïdes ont
la même signification que les engrenages droits et hélicoïdaux chez les engrenages cylindriques.
La variété de formes de dents pour les engrenages coniques est cependant beaucoup plus
vaste que celle rencontrée chez les engrenages cylindriques; la seule limitation est en fait la
possibilité de fabrication. Cette flexibilité permet d'ajuster à volonté les réactions sur les paliers, le
glissement et la distribution des forces sur les dents. En contrepartie, chaque paire d'engrenages est
unique, c'est-à-dire que chacun des engrenages de la paire ne peut fonctionner qu'avec son
partenaire. Pour le remplacement des pièces dans un contexte industriel, ceci rend l'usager tributaire
du manufacturier qui est le seul à connaître les paramètres de fabrication de la paire d'engrenages.
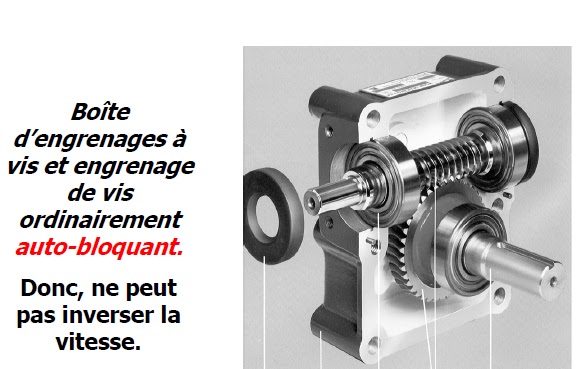
Pour raccorder des arbres à 90
souvent une vis et un engrenage de vis, figure 12.4. La vis ressemble à un engrenage cylindrique
hélicoïdal dont la dent fait avec l'axe de rotation du cylindre un angle près de 90
devient un filet; c'est pourquoi on l'appelle une vis. L'engrenage de vis de son côté ressemble plus à
un engrenage hélicoïdal en ce sens que ses dents sont disposées sur le cylindre avec un angle
beaucoup plus modeste. Mais là s'arrête la similitude : le flanc de la dent de l'engrenage de vis est
concave dans la direction axiale et le dessus de la dent a aussi une forme concave cylindrique pour
accommoder la vis.
Plusieurs autres types d'engrenages avec d'autres dentures existent : on peut nommer les
engrenages à chevrons, les engrenages coniques Zerol
Spiroïd
engrenages de vis à simple et double enveloppement ni les profils de denture arc de cercle. Une
bonne description et une bonne étude sont faites de ces types peu courants d'engrenages dans le
Gear Handbook de Darle W. Dudley [12.2].La figure 12.5 illustre les définitions de saillie, de creux, de cercle de tête, de cercle primitif,
de cercle de pied et de cercle de base avec leur rayon respectif de même que celles du pas circulaire
primitif et du pas circulaire de base.
Les engrenages fonctionnement toujours en paire. La figure 12.6(a) montre
schématiquement les notions fondamentales d'une paire d'engrenages cylindriques droits dans le
plan transversal, c'est-à-dire dans un plan normal à l'axe des arbres réunis par la paire d'engrenages.
On y remarque deux centres, O
menant, et de l'engrenage, celui mené. On remarque aussi les deux cercles de base de rayon
1 et O2, qui sont les centres de rotation du pignon, l'engrenageRb1 etR
b2. Sur l'engrenage menant, ω1
sens de rotation est inversé : alors
et T1 sont dans le même sens. Dans un système d'engrenages, leω2 est en sens inverse de ω1
et T2 est dans le sens inverse de ω2
Dans le plan transversal, la ligne de contact théorique des flancs d'une dent menante et d'une
dent menée ayant toutes les deux un profil développante de cercle apparaît selon un point; cela est
montré à la figure 12.6(a) comme le point
de tous les points de contact théoriques dans le plan transversal est appelé la ligne d'action. Dans leRb1 et Rb2 et les points de tangence sont montrés comme les points E1 et E2 dansW
force normale
est pour indiquer que la force est normale au flanc de la dent.
Le point de rencontre de la ligne d'action avec la ligne des centres O
point primitif
on peut démontrer que les angles
l'angle de pression
d'action, figure 12.6(b) ou la ligne primitive et la ligne d'action, figure 12.6(a).n2 dirigée comme montré pour le sens de T1 montré. La réaction de la dent 2 sur la dent 1 est laWn1 avec Wn1 = Wn2 pour que la paire de dents soit en équilibre statique. L'indice n1 O2 est par définition leP; le point P définit les cercles primitifs de rayons R1 et R2. Par triangles semblables,E1 O1 P et E2 O2 P sont égaux; cet angle, par définition, est appeléϕ. L'angle de pression ν se retrouve aussi entre le plan primitif et le plan
plan transversal, la ligne d'action est un plan vu par la tranche, figure 12.6(b). Selon les propriétés
du profil développante de cercle, voir la référence [12.3], le plan d'action doit être tangent aux deux
cylindres de base, figure 12.6(b). Dans le plan transversal, les cylindres de base sont vus comme
des cercles de rayon
la figure 12.6(a).
Selon toujours les propriétés du profil développante de cercle, la ligne d'action est la
normale commune aux flancs des dents en contact; c'est donc dire que, pour les deux dents montrées
en contact au point e dans la figure 12.6(a), l'action de la dent 1 sur la dent 2 est la force normale
.e pour une phase quelconque de l'engrènement et le lieu
ENGRENAGES CYLINDRIQUES DROITS
Les engrenages cylindriques droits industriels sont fabriqués avec une denture ayant un
profil développante de cercle. Les propriétés de cette courbe de même que le fonctionnement et le
calcul de ces engrenages sont étudiés assez en détail à la référence [12.3], Éléments de machines par
Drouin et al. Cette section se limite à ajouter deux notions à celles qui sont vues à la référence
[16.3] : soit celle de la vitesse de glissement et du rendement. Cette section sert également de rappel
de la nomenclature et de la géométrie de base des engrenages avec une denture à profil
développante de cercle.
Géométrie et nomenclature
o mais qui ne se rencontrent pas dans un plan, on utilise le pluso, de sorte qu'elle, Beveloïd, Hypoïd, Plenoïd,, Helicon, les engrenages hélicoïdaux gauches, les engrenages couronne sans oublier les